Boston Dynamics Spot Robot
Type of Project: Robotics Research & Development
Status: Ongoing Research
Summary:
Working with Boston Dynamics Spot quadruped robot to develop custom payload platforms and deploy reinforcement-learning-based locomotion policies for real-world validation.
Payload Development
Designed, 3D printed, and soldered custom payload platform; integrated compute and perception stacks (LiDAR, RGB-D).
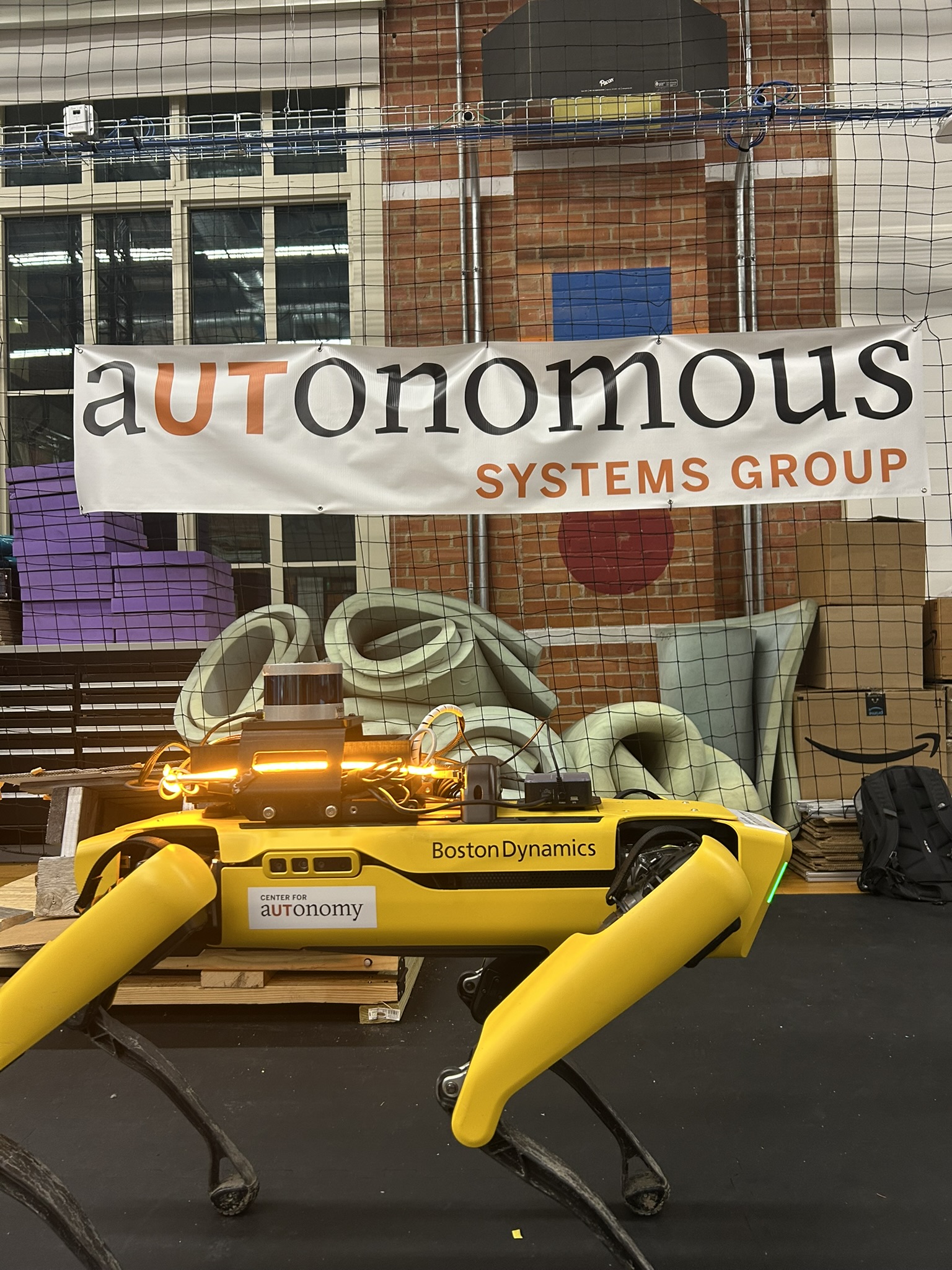
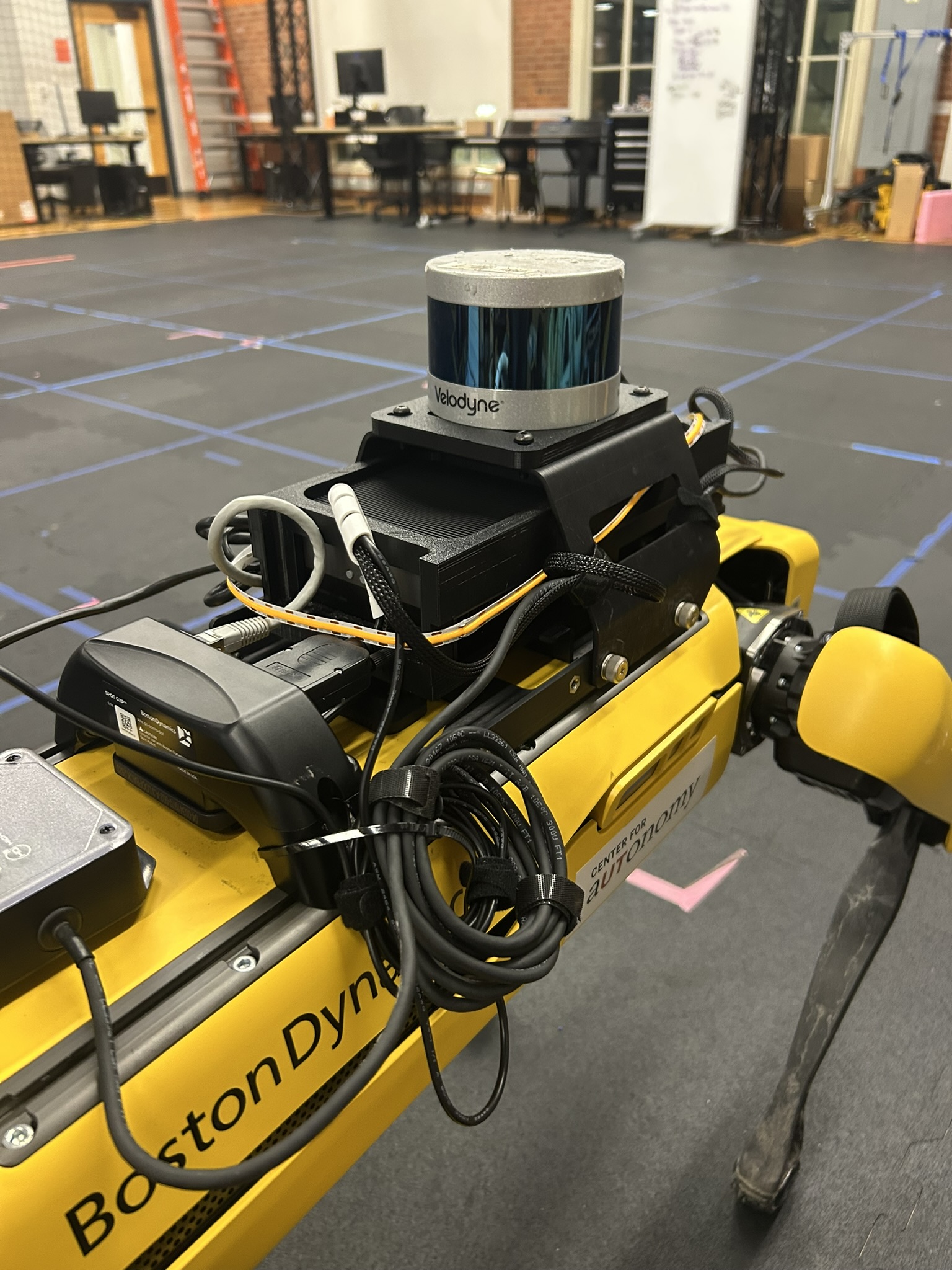
Custom-designed payload platform with integrated sensors
Policy Training
Trained reinforcement-learning-based gait policies using NVIDIA Isaac Lab simulation environment.
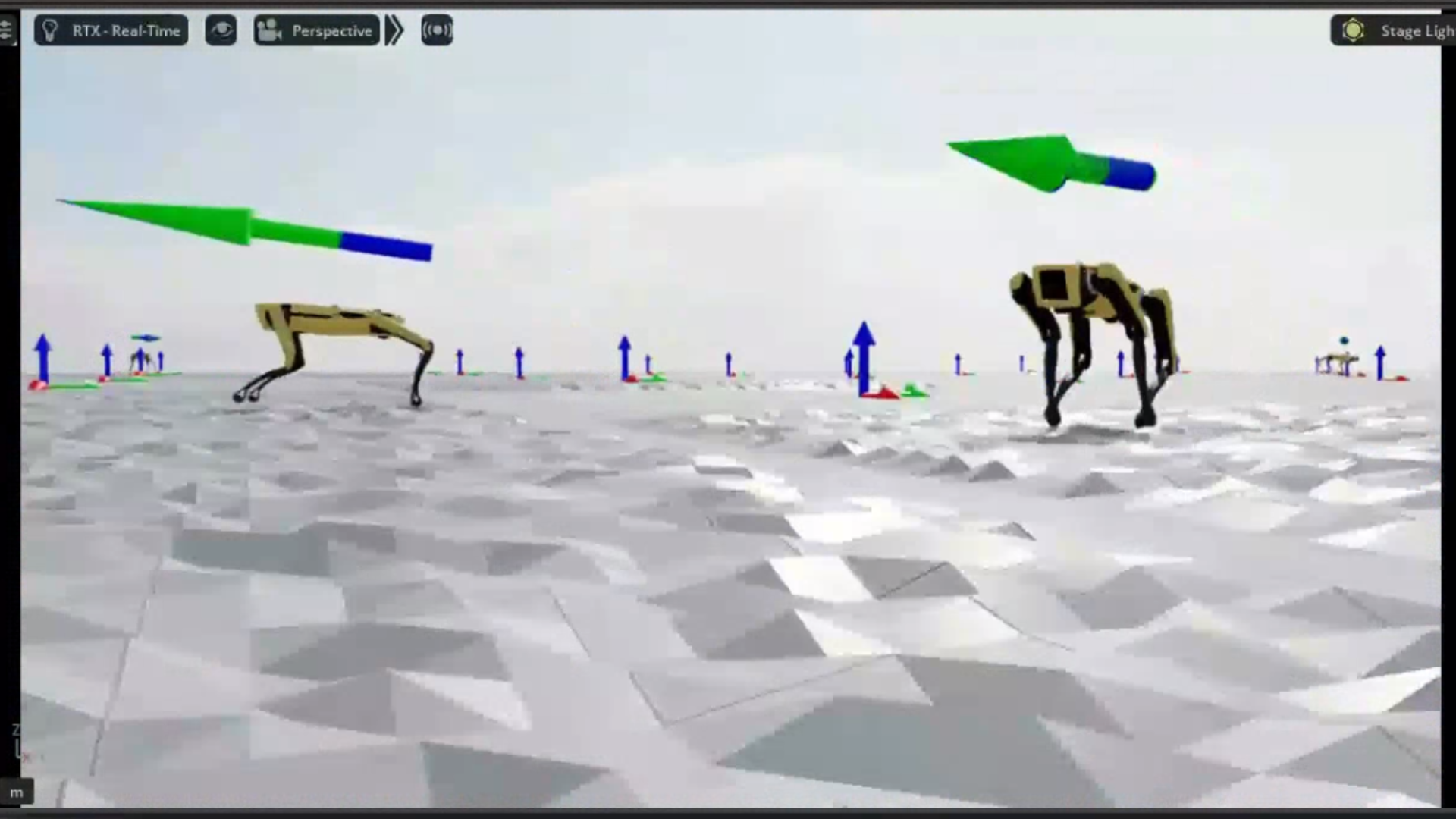
Reinforcement learning policy training in NVIDIA Isaac Lab simulation
Deployment & Validation
Deployed trained policies on real hardware and validated performance in real-world conditions.
Deployment testing with reinforcement-learning-based gait policies
Technical Stack
- Robotics Platforms: Boston Dynamics Spot SDK, ROS
- Simulation: NVIDIA Isaac Lab
- Machine Learning: Reinforcement Learning (policy training & deployment)
- Hardware: Custom CAD design, 3D printing, sensor integration
- Perception: LiDAR, RGB-D camera integration and processing
- Skills: Hardware-software integration, real-world robotics deployment, sensor fusion
Key Contributions
- Custom Payload Design: Designed and fabricated payload platform for compute and sensor mounting
- RL Policy Deployment: Trained locomotion policies in simulation and validated on real hardware
- System Integration: Integrated perception stack with robot control systems
- Field Testing: Conducted real-world deployment tests and performance validation