Front-Facing LiDAR Altitude Estimation
Type of Project: Commercial Internship at Perciv AI, Real-Time Robotics
Status: Commercially implemented in ABZ Innovation agricultural drones

Figure 1: Live field testing in an unstructured environment to validate altitude estimation accuracy
Spatiotemporal Tracking of Dynamic Structures from Satellite Data
Type of Project: Undergraduate Academic Research, Algorithm Design, Data Processing
Status: Completed, Advisor: Ernst Schrama
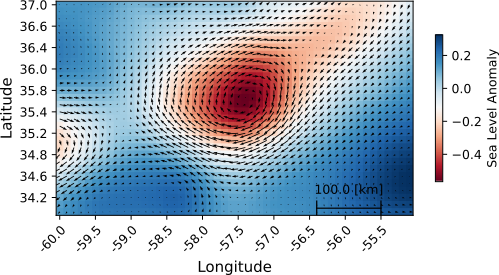
Figure 1: Geostrophic velocities are used to compute the Okubo-Weiss parameter