
Hi, I’m Michal!
I am a BAEF fellow and graduate student (MSc) in Aerospace Engineering – Controls, Autonomy, and Robotics at UT Austin.
I work as a graduate research assistant in robotics and autonomy at the Autonomous Systems Group.
Projects
Multi-View Perception and Uncertainty Fusion for Autonomous Robots
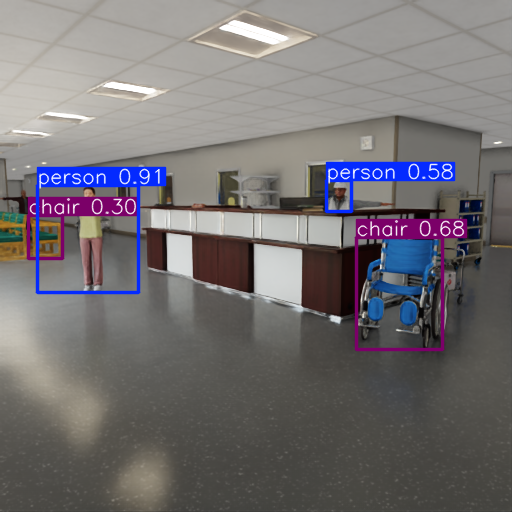
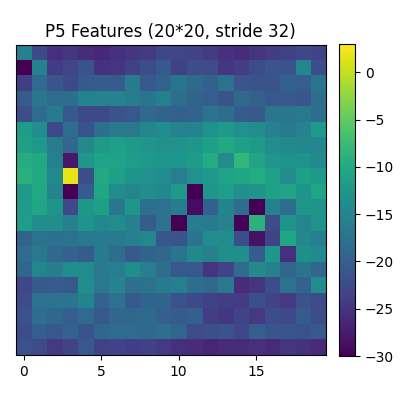
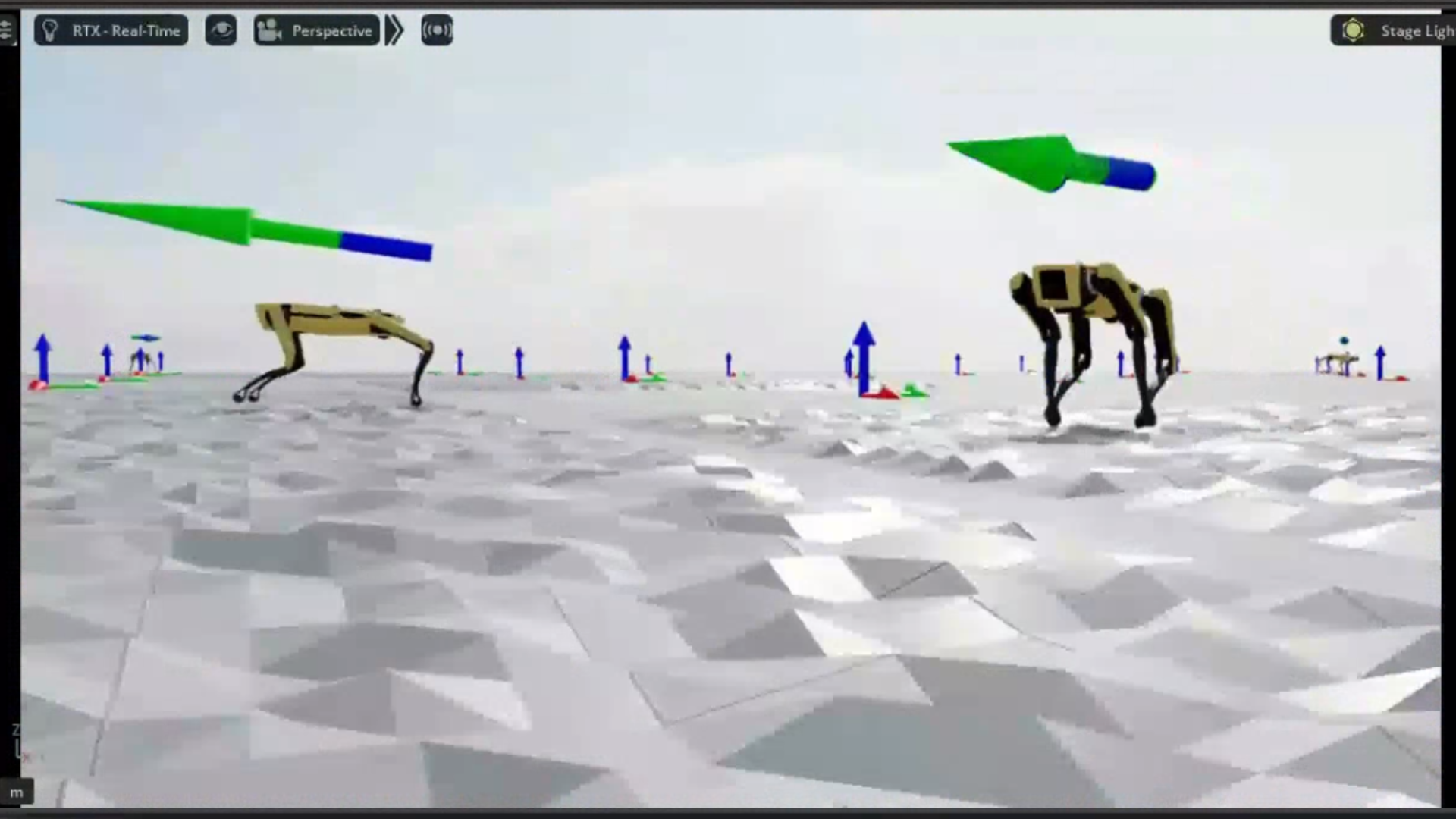
Ongoing research on multi-view perception fusion with rigorous uncertainty guarantees for safe autonomous operation, involving NVIDIA Isaac Sim.
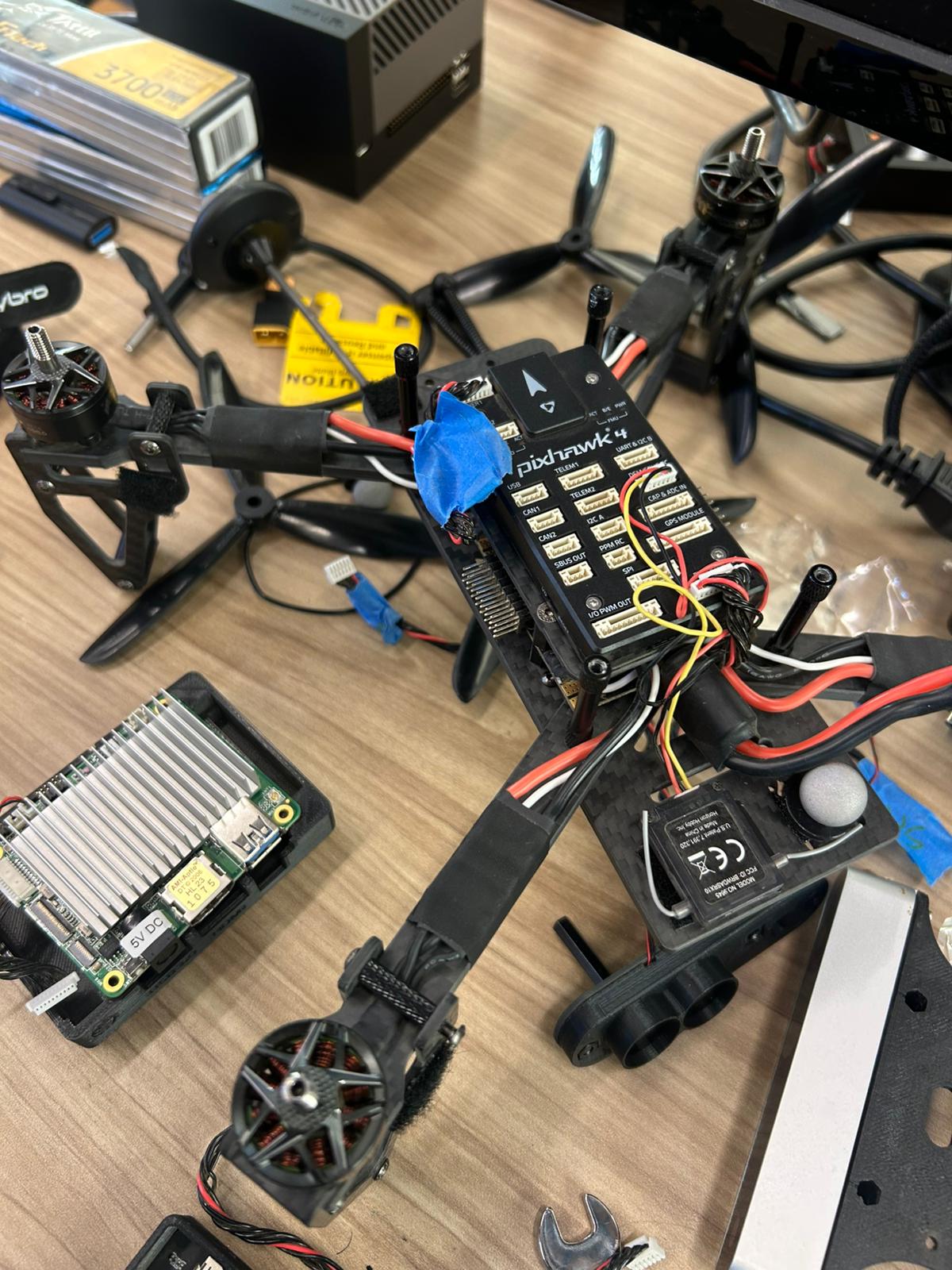
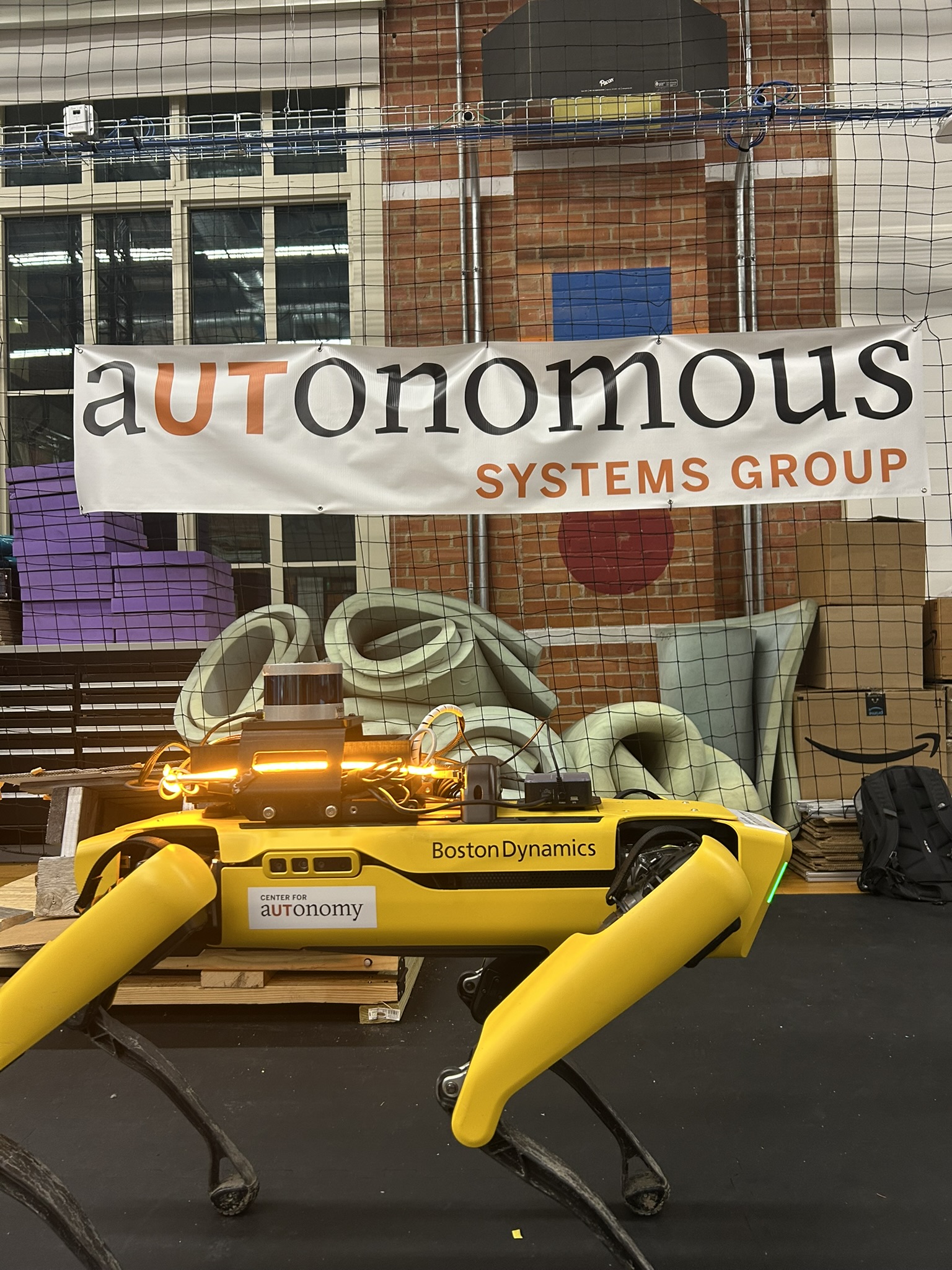
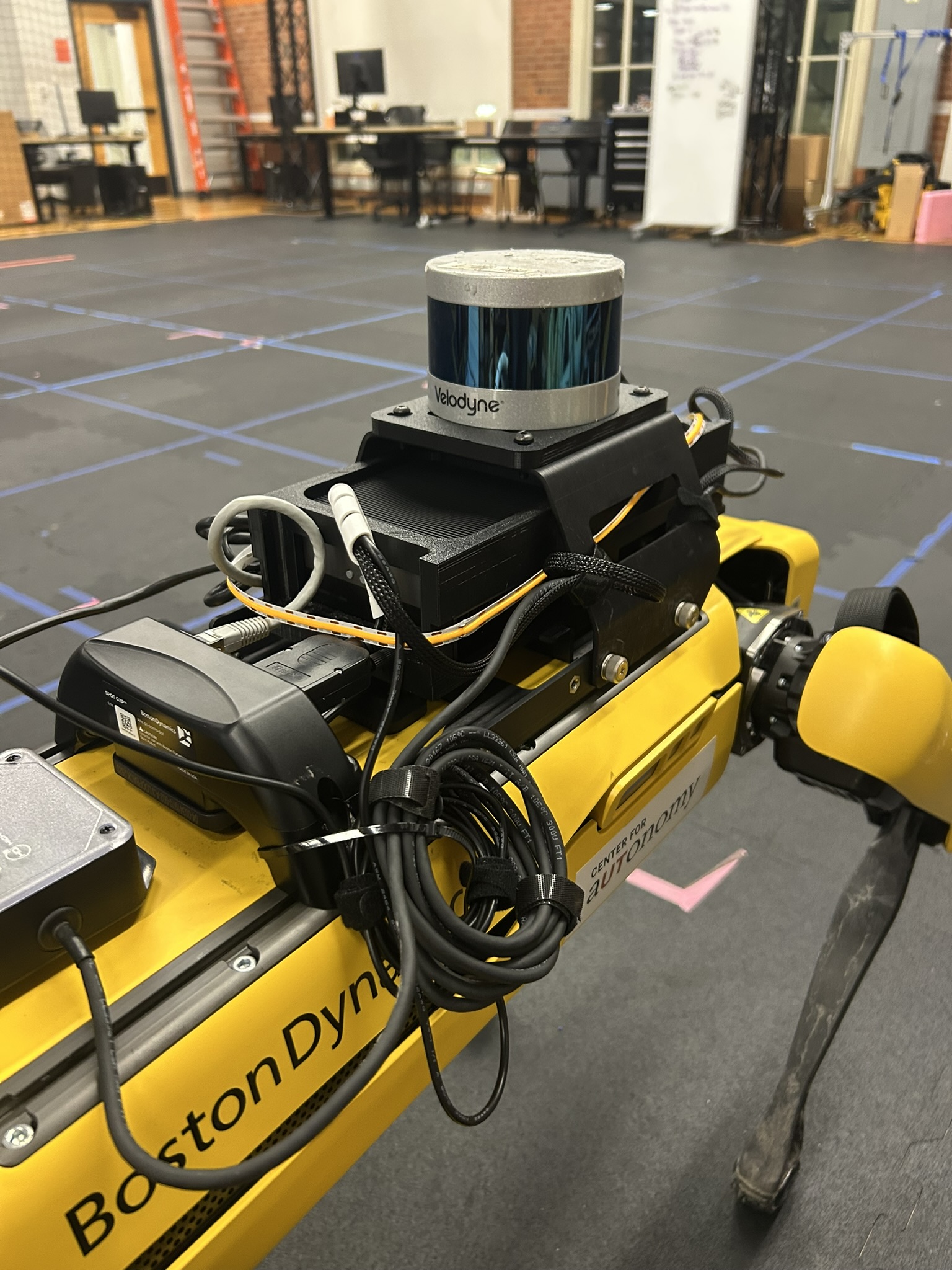
Boston Dynamics Spot Robot
Custom payload development and reinforcement learning-based gait policy deployment on real hardware.
Front-Facing LiDAR Altitude Estimation
LiDAR-only Robust altitude estimation for UAVs in unstructured environments.



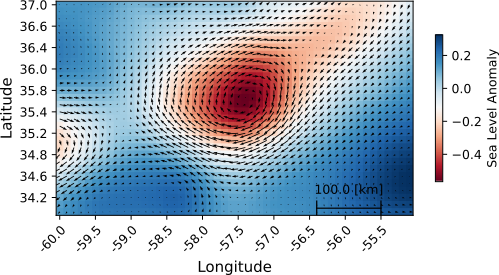
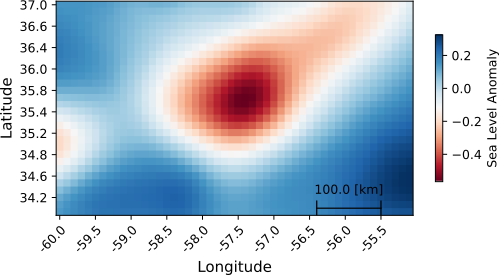
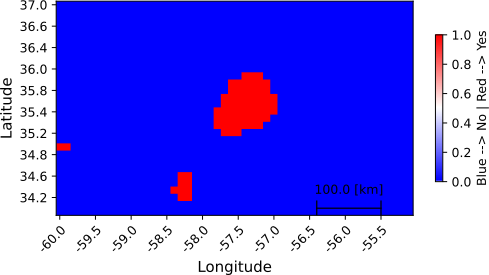
Spatiotemporal Tracking from Satellite Data
Python pipeline for detecting and tracking dynamic oceanic eddies from satellite data.
Outreach
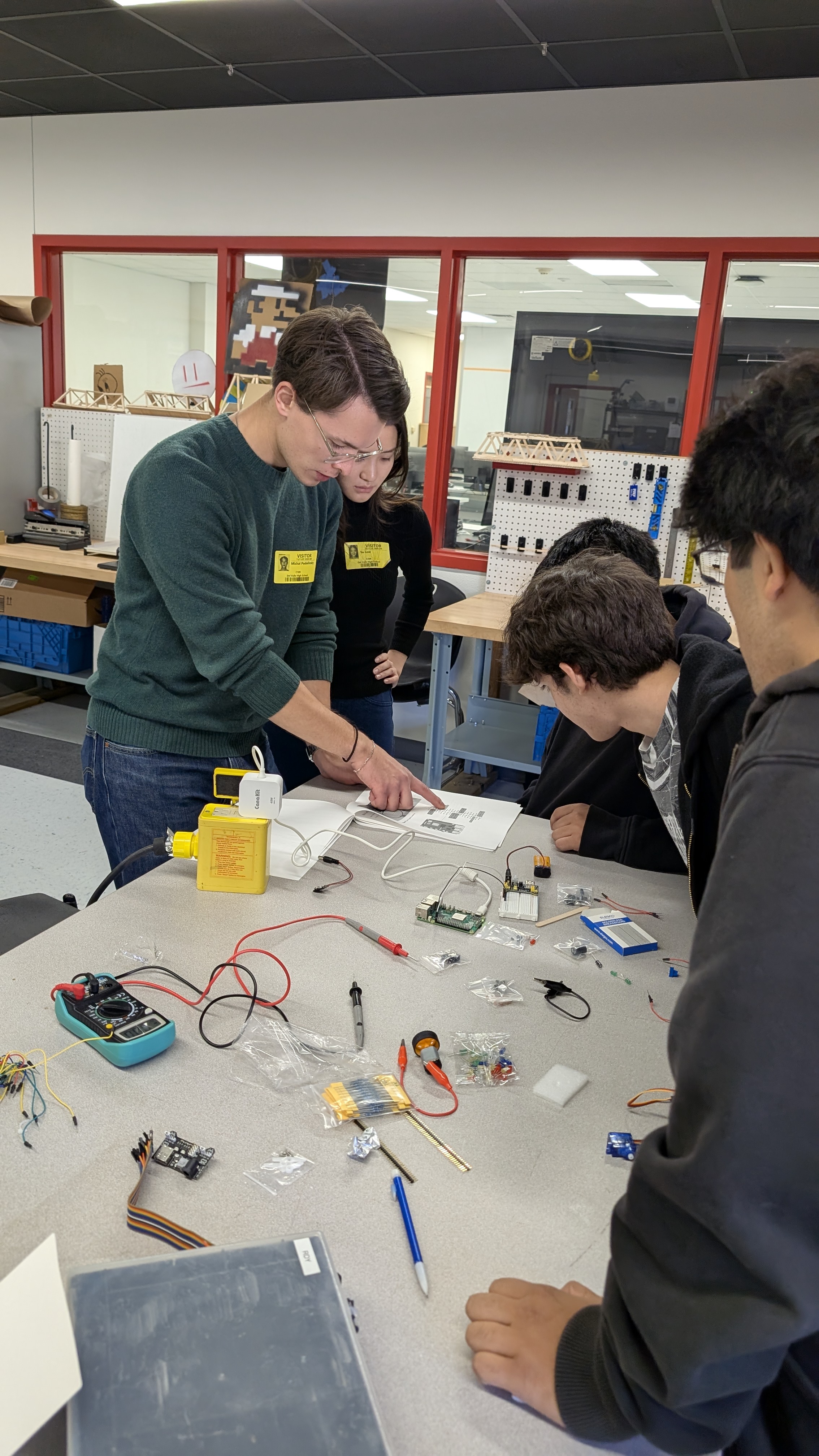
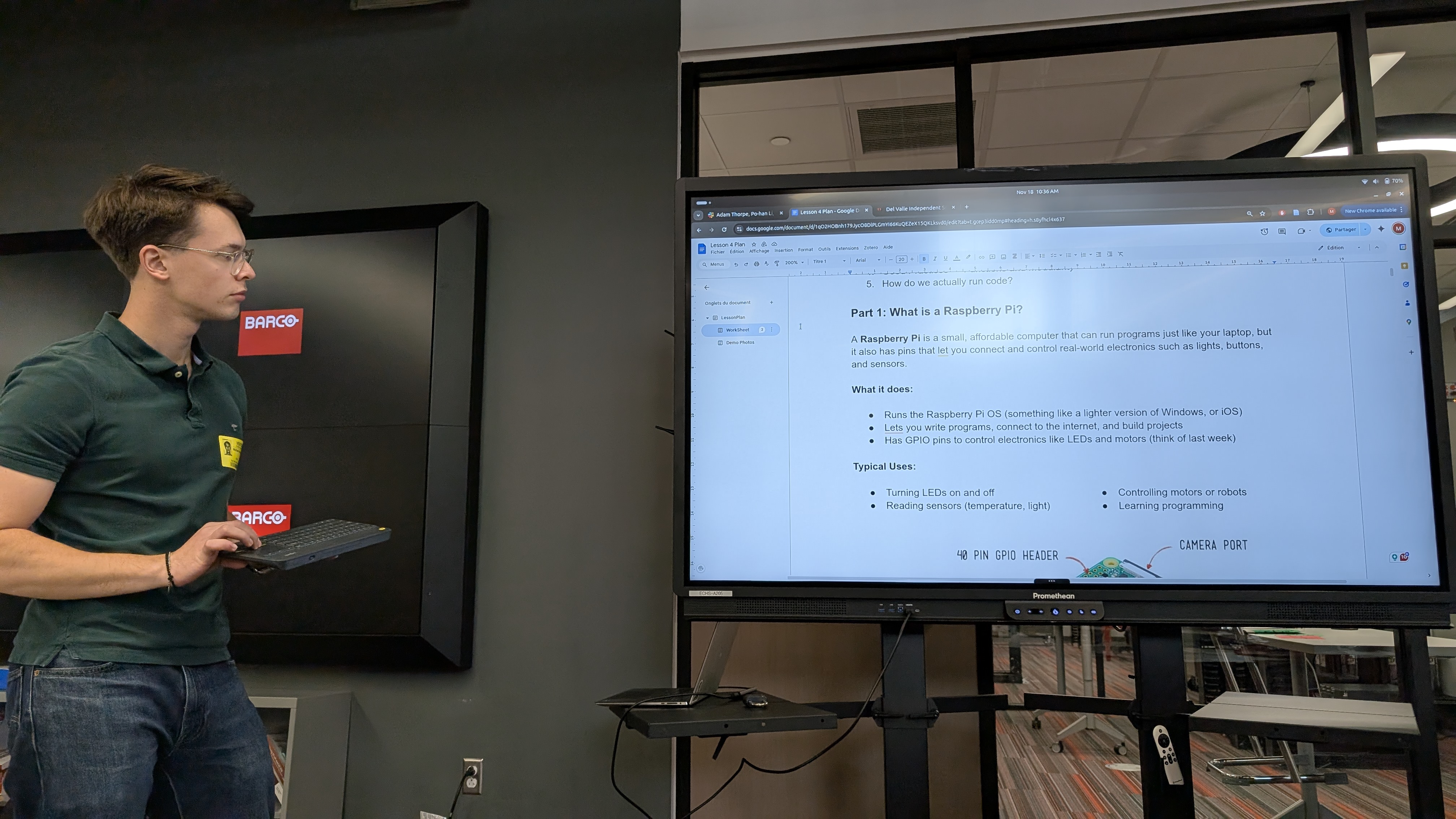
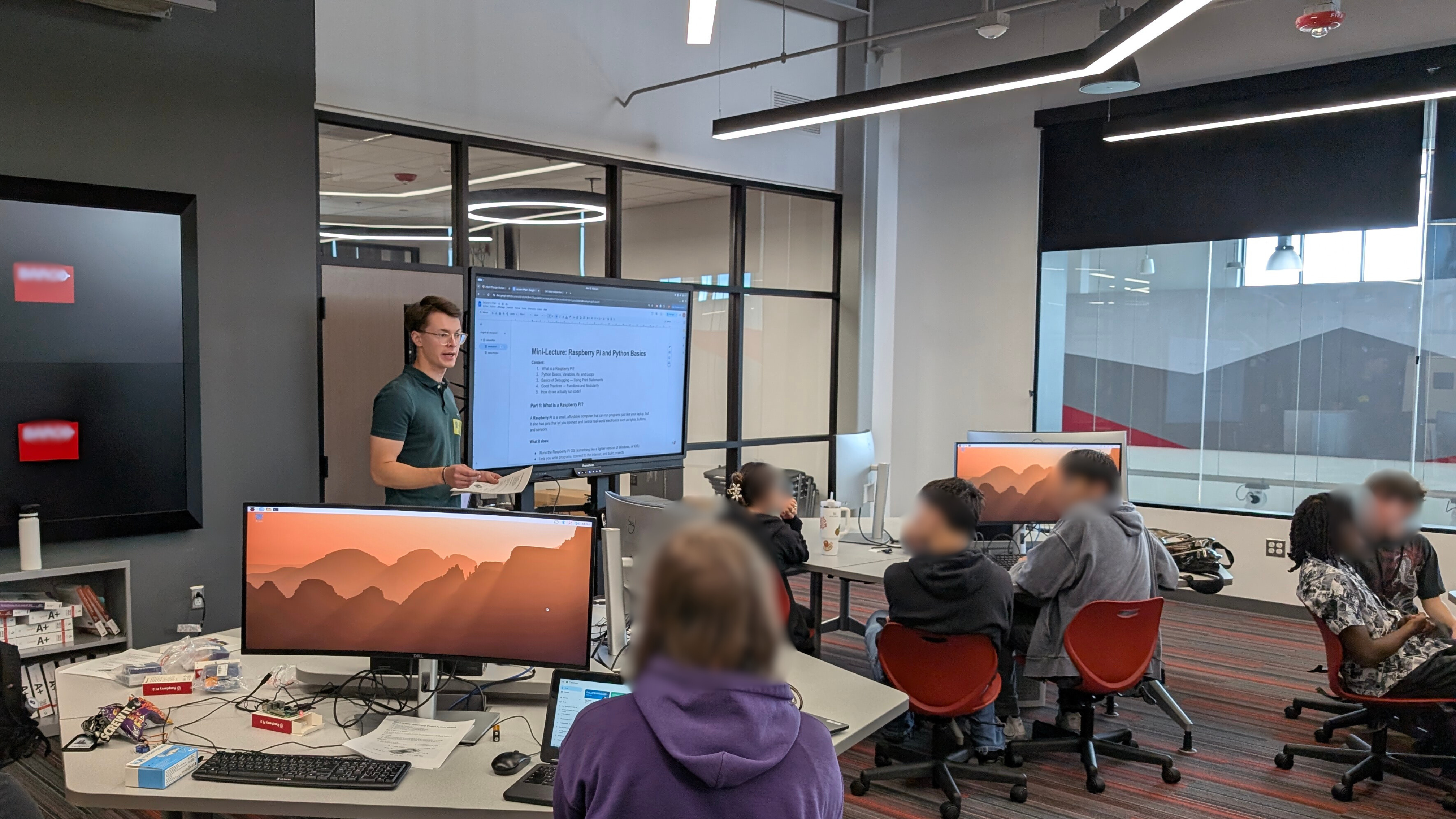
Del Valle High School Autonomous Car Project - Army Educational Outreach Program
Hands-on sessions covering servos, sensors, Python programming, and hardware control to build an autonomous RC car.
Tutorials
- [coming soon] Synthetic data generation with NVIDIA Isaac Sim Replicator